Teleoperating robots
In MVSim, all robots or vehicles need to be assigned a controller
(read Motion controllers).
If you are running MVSim as a ROS node, most such controllers
accept motion commands sent to the topic /cmd_vel as with any other robot or simulator.
If no data is being published to /cmd_vel, or if you run MVSim without ROS support,
three alternative methods can be used to move the robots:
Via ZMQ messages using the MVSim built-in messaging protocol (Write me!). See a Python code example.
Joystick, if present (see below).
Keyboard, from the MVSim GUI (see below).
Joystick
For joystick control to work, you must:
Make sure your world XML file has a global flag
<joystick_enabled>set totrue, since that property is disabled by default (see Top-level and global simulation settings).Plug in a joystick before launching MVSim.
Use one of these vehicle kinematics and controllers (read Motion controllers):
DynamicsAckermann:ControllerFrontSteerPID,ControllerTwistFrontSteerPIDDynamicsAckermannDrivetrain:ControllerTwistFrontSteerPIDDynamicsDifferential:ControllerTwistIdeal,ControllerTwistPID
You can check whether Joystick control is working by looking at the “Status” GUI window. It should say “Joystick” teleoperation instead of “Keyboard”.
Then, use these controls:
Axis
1: Move forwards / backwards.Axis
0: Rotate clockwise / counterclockwise.Axis
2: Can be used to change the GUI camera point of view (azimuth).Right “trigger” buttons
5and7: Increase/decrease maximum linear speed.Left “trigger” buttons
4and6: Increase/decrease maximum angular speed.Button
3: Emergency stop / brake.
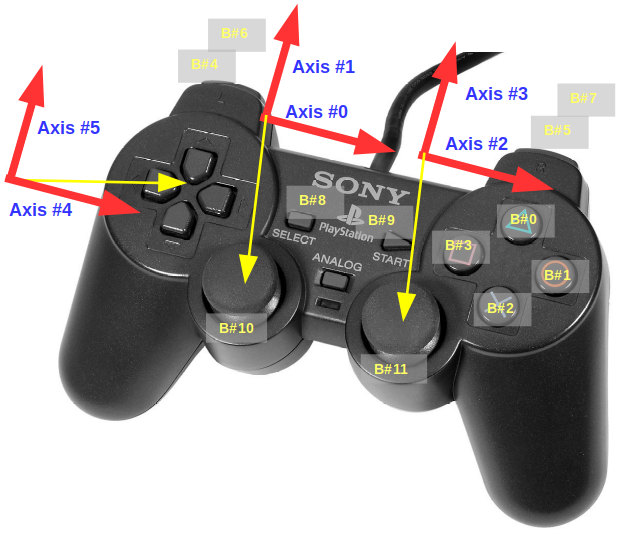
Game controller axes and button numbering.
Keyboard
w/sto increase/decrease the PI controller setpoint linear speed, anda/dto change the corresponding angular speed, that is, rotate to the left and right.Use the spacebar as a brake.
In worlds with more than one robot, select the active robot by pressing the numeric keys
1,2, etc.