Architecture
Please, refer to the MVSim paper for a gentle introduction to the project architecture.
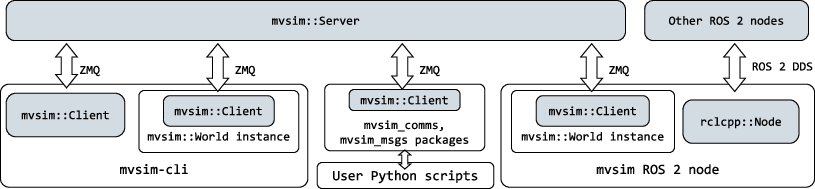
Overview of the different possibilities to communicate with a running MVSim instance.
The project comprises:
C++ libraries:
libmvsim_comms,libmvsim_msgs,libmvsim_simulator.A ROS 1 and ROS 2 node (both in the same git branch).
Python3 wrappers.
mvsim-cli: A standalone program to run the simulation and, optionally, displaying a GUI live view of the world, accept keyboard/mouse orders, etc. It also uses ZMQ+protobuf as a communication system for user programs to interact with the simulation (for example, from a C++ or Python program).