#include <VehicleBase.h>
Classes | |
| struct | OdometryNoise |
Public Types | |
| using | Ptr = std::shared_ptr< VehicleBase > |
 Public Types inherited from mvsim::Simulable Public Types inherited from mvsim::Simulable | |
| using | Ptr = std::shared_ptr< Simulable > |
Public Member Functions | |
| virtual void | simul_pre_timestep (const TSimulContext &context) override |
| virtual void | simul_post_timestep (const TSimulContext &context) override |
| virtual void | apply_force (const mrpt::math::TVector2D &force, const mrpt::math::TPoint2D &applyPoint=mrpt::math::TPoint2D(0, 0)) override |
| virtual void | create_multibody_system (b2World &world) |
| virtual double | getMaxVehicleRadius () const |
| virtual double | getChassisMass () const |
| b2Body * | getBox2DChassisBody () |
| mrpt::math::TPoint2D | getChassisCenterOfMass () const |
| In local coordinates (this excludes the mass of wheels) | |
| size_t | getNumWheels () const |
| const Wheel & | getWheelInfo (const size_t idx) const |
| Wheel & | getWheelInfo (const size_t idx) |
| std::vector< mrpt::math::TVector2D > | getWheelsVelocityLocal (const mrpt::math::TTwist2D &veh_vel_local) const |
| virtual mrpt::math::TTwist2D | getVelocityLocalOdoEstimate () const =0 |
| double | estimateSlopeTorquePerWheel (size_t nDrivenWheels=0) const |
| const TListSensors & | getSensors () const |
| TListSensors & | getSensors () |
| CSVLogger::Ptr | getLoggerPtr (const std::size_t logger_index) |
| const std::vector< CSVLogger::Ptr > & | getLoggers () const |
| const mrpt::math::TPolygon2D & | getChassisShape () const |
| void | setVehicleIndex (size_t idx) |
| size_t | getVehicleIndex () const |
| void | setRecording (bool record) |
| void | clearLogs () |
| void | newLogSession () |
| virtual ControllerBaseInterface * | getControllerInterface ()=0 |
| void | registerOnServer (mvsim::Client &c) override |
| b2Fixture * | get_fixture_chassis () |
| std::vector< b2Fixture * > & | get_fixture_wheels () |
| const b2Fixture * | get_fixture_chassis () const |
| const std::vector< b2Fixture * > & | get_fixture_wheels () const |
| void | freeOpenGLResources () override |
| void | chassisAndWheelsVisible (bool visible) |
| double | chassisZMin () const |
| double | chassisZMax () const |
| const mrpt::math::TPoint3D & | getSlopeDirection () const |
| void | setSlopeDirection (const mrpt::math::TPoint3D &d) |
| mrpt::poses::CPose2D | getOdometry () const |
| void | resetOdometry () |
| bool | isLogging () const |
| Public Member Functions inherited from mvsim::VisualObject | |
| VisualObject (World *parent, bool insertCustomVizIntoViz=true, bool insertCustomVizIntoPhysical=true) | |
| VisualObject (const VisualObject &)=delete | |
| VisualObject & | operator= (const VisualObject &)=delete |
| VisualObject (VisualObject &&)=delete | |
| VisualObject & | operator= (VisualObject &&)=delete |
| virtual void | guiUpdate (const mrpt::optional_ref< mrpt::opengl::COpenGLScene > &viz, const mrpt::optional_ref< mrpt::opengl::COpenGLScene > &physical) |
| World * | parent () |
| const World * | parent () const |
| void | customVisualVisible (const bool visible) |
| bool | customVisualVisible () const |
| const std::optional< Shape2p5 > & | collisionShape () const |
| void | showCollisionShape (bool show) |
| Public Member Functions inherited from mvsim::Simulable | |
| Simulable (World *parent) | |
| mrpt::math::TTwist2D | getRefVelocityLocal () const |
| mrpt::math::TTwist2D | getVelocityLocal () const |
| mrpt::math::TTwist2D | getRefVelocityGlobal () const |
| mrpt::math::TTwist2D | getComVelocityGlobal () const |
| mrpt::math::TPose3D | getPose () const |
| virtual mrpt::math::TPose3D | getRelativePose () const |
| mrpt::math::TPose3D | getPoseNoLock () const |
| No thread-safe version. Used internally only. | |
| mrpt::math::TVector3D | getLinearAcceleration () const |
| void | setPose (const mrpt::math::TPose3D &p, bool notifyChange=true) const |
| virtual void | setRelativePose (const mrpt::math::TPose3D &p) |
| void | setRefVelocityLocal (const mrpt::math::TTwist2D &dq) |
| mrpt::poses::CPose2D | getCPose2D () const |
| Alternative to getPose() | |
| mrpt::poses::CPose3D | getCPose3D () const |
| Alternative to getPose() | |
| const std::string & | getName () const |
| void | setName (const std::string &s) |
| bool | isInCollision () const |
| bool | hadCollision () const |
| void | resetCollisionFlag () |
| const b2Body * | b2d_body () const |
| b2Body * | b2d_body () |
| World * | getSimulableWorldObject () |
| const World * | getSimulableWorldObject () const |
| virtual std::optional< float > | getElevationAt ([[maybe_unused]] const mrpt::math::TPoint2D &worldXY) const |
Static Public Member Functions | |
| static Ptr | factory (World *parent, const rapidxml::xml_node< char > *xml_node) |
| static Ptr | factory (World *parent, const std::string &xml_text) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. | |
| static void | register_vehicle_class (const World &parent, const rapidxml::xml_node< char > *xml_node) |
| Static Public Member Functions inherited from mvsim::VisualObject | |
| static void | FreeOpenGLResources () |
Static Public Attributes | |
| static constexpr std::string_view | DL_TIMESTAMP = "Timestamp" |
| static constexpr std::size_t | LOGGER_IDX_POSE = 0 |
| static constexpr std::size_t | LOGGER_IDX_WHEELS = 1 |
| static constexpr std::string_view | PL_Q_X = "q0x" |
| static constexpr std::string_view | PL_Q_Y = "q1y" |
| static constexpr std::string_view | PL_Q_Z = "q2z" |
| static constexpr std::string_view | PL_Q_YAW = "q3yaw" |
| static constexpr std::string_view | PL_Q_PITCH = "q4pitch" |
| static constexpr std::string_view | PL_Q_ROLL = "q5roll" |
| static constexpr std::string_view | PL_DQ_X = "dqx" |
| static constexpr std::string_view | PL_DQ_Y = "dqy" |
| static constexpr std::string_view | PL_DQ_W = "dqw" |
| static constexpr std::string_view | PL_ODO_X = "odo_x" |
| static constexpr std::string_view | PL_ODO_Y = "odo_y" |
| static constexpr std::string_view | PL_ODO_YAW = "odo_yaw" |
| static constexpr std::string_view | WL_TORQUE = "torque" |
| static constexpr std::string_view | WL_FORCE_Z = "force_z" |
| static constexpr std::string_view | WL_VEL_X = "velocity_x" |
| static constexpr std::string_view | WL_VEL_Y = "velocity_y" |
| static constexpr std::string_view | WL_FRIC_X = "friction_x" |
| static constexpr std::string_view | WL_FRIC_Y = "friction_y" |
| Static Public Attributes inherited from mvsim::VisualObject | |
| static double | GeometryEpsilon |
Protected Member Functions | |
| virtual void | initLoggers () |
| virtual void | writeLogStrings () |
| virtual void | internalGuiUpdate (const mrpt::optional_ref< mrpt::opengl::COpenGLScene > &viz, const mrpt::optional_ref< mrpt::opengl::COpenGLScene > &physical, bool childrenOnly) override |
| VehicleBase (World *parent, size_t nWheels) | |
| virtual void | dynamics_load_params_from_xml (const rapidxml::xml_node< char > *xml_node)=0 |
| virtual std::vector< double > | invoke_motor_controllers (const TSimulContext &context)=0 |
| virtual void | invoke_motor_controllers_post_step ([[maybe_unused]] const TSimulContext &context) |
| VisualObject * | meAsVisualObject () override |
| void | updateMaxRadiusFromPoly () |
| Protected Member Functions inherited from mvsim::VisualObject | |
| bool | parseVisual (const rapidxml::xml_node< char > &rootNode) |
Returns true if there is at least one <visual>...</visual> entry. | |
| bool | parseVisual (const JointXMLnode<> &rootNode) |
| void | addCustomVisualization (const mrpt::opengl::CRenderizable::Ptr &glModel, const mrpt::poses::CPose3D &modelPose={}, const float modelScale=1.0f, const std::string &modelName="group", const std::optional< std::string > &modelURI=std::nullopt, const bool initialShowBoundingBox=false, const std::optional< double > &scaleOverride=std::nullopt) |
| void | setCollisionShape (const Shape2p5 &cs) |
Protected Attributes | |
| std::vector< CSVLogger::Ptr > | loggers_ |
| std::string | log_path_ |
| bool | auto_start_recording_ = false |
| bool | idealControllerActive_ = false |
| size_t | vehicle_index_ = 0 |
| std::vector< FrictionBase::Ptr > | frictions_ |
| TListSensors | sensors_ |
| Sensors aboard. | |
| double | chassis_mass_ = 15.0 |
| mrpt::math::TPolygon2D | chassis_poly_ |
| float | linear_damping_ = 0.1 |
| float | angular_damping_ = 0.1 |
| double | maxRadius_ = 0.1 |
| double | chassis_z_min_ = 0.05 |
| double | chassis_z_max_ = 0.6 |
| mrpt::img::TColor | chassis_color_ {0xff, 0x00, 0x00} |
| mrpt::math::TPoint2D | chassis_com_ {0, 0} |
| mrpt::math::TPoint3D | slopeDir_ {0, 0, -1} |
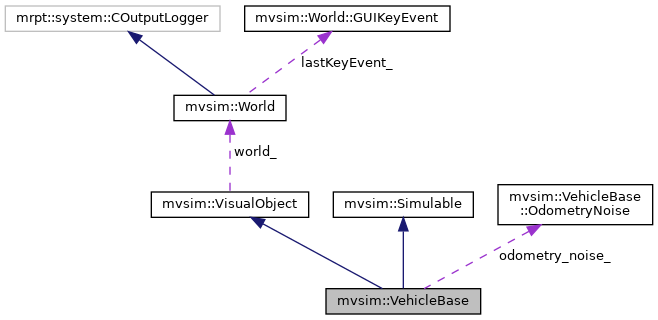
| OdometryNoise | odometry_noise_ |
| std::deque< Wheel > | wheels_info_ |
| b2Fixture * | fixture_chassis_ = nullptr |
| Created at. | |
| std::vector< b2Fixture * > | fixture_wheels_ |
| Protected Attributes inherited from mvsim::VisualObject | |
| World * | world_ |
| std::shared_ptr< mrpt::opengl::CSetOfObjects > | glCustomVisual_ |
| std::shared_ptr< mrpt::opengl::CSetOfObjects > | glCollision_ |
| int32_t | glCustomVisualId_ = -1 |
| const bool | insertCustomVizIntoViz_ = true |
| const bool | insertCustomVizIntoPhysical_ = true |
| Protected Attributes inherited from mvsim::Simulable | |
| std::string | name_ |
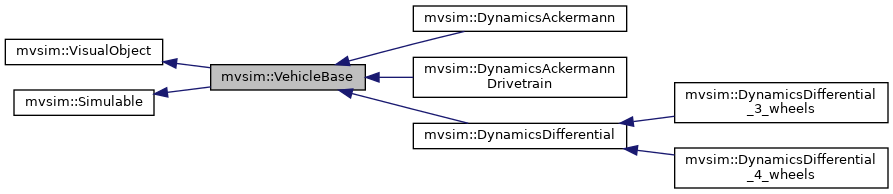
Detailed Description
Virtual base class for each vehicle "actor" in the simulation. Derived classes implements different dynamical models (Differential, Ackermann,...)
Member Function Documentation
◆ apply_force()
|
overridevirtual |
Override to register external forces exerted by other WorldElements. Force is (fx,fy) in global coordinates. Application point is (local_ptx,local_pty) in the body local frame
Reimplemented from mvsim::Simulable.
◆ create_multibody_system()
|
virtual |
Create bodies, fixtures, etc. for the dynamical simulation. May be overriden by derived classes
◆ dynamics_load_params_from_xml()
|
protectedpure virtual |
Parse node <dynamics>: The derived-class part of load_params_from_xml(), also called in factory(). Includes parsing the <controller></controller> block.
Implemented in mvsim::DynamicsDifferential, mvsim::DynamicsAckermannDrivetrain, and mvsim::DynamicsAckermann.
◆ estimateSlopeTorquePerWheel()
| double mvsim::VehicleBase::estimateSlopeTorquePerWheel | ( | size_t | nDrivenWheels = 0 | ) | const |
Estimate the per-wheel torque needed to counteract gravity on a slope. Returns the torque (in Nm) that would be needed per driven wheel to hold the vehicle stationary on the current slope. Positive = uphill resistance (opposing forward motion on an uphill).
- Parameters
-
[in] nDrivenWheels Number of driven wheels sharing the load.
◆ factory()
|
static |
Class factory: Creates a vehicle from XML description of type "<vehicle>...</vehicle>".
◆ getChassisMass()
|
inlinevirtual |
Get the overall vehicle mass, excluding wheels.
◆ getChassisShape()
|
inline |
Get the 2D shape of the vehicle chassis, as set from the config file (only used for collision detection)
◆ getMaxVehicleRadius()
|
inlinevirtual |
Get (an approximation of) the max radius of the vehicle, from its point of reference (in meters)
◆ getOdometry()
|
inline |
Gets the noisy, biased, odometry estimation.
◆ getSlopeDirection()
|
inline |
The "down" direction (0,0,-1) in vehicle local frame, as computed from the terrain slope. Updated each timestep by the terrain elevation module. On flat ground this is (0,0,-1). On a slope, the x/y components indicate the gravity slope force direction.
◆ getVehicleIndex()
|
inline |
Get the vehicle index in the World
◆ getVelocityLocalOdoEstimate()
|
pure virtual |
Gets the current estimation of odometry-based velocity as reconstructed solely from wheels spinning velocities and geometry. This is the input of any realistic low-level controller onboard.
- See also
- getRefVelocityLocal()
Implemented in mvsim::DynamicsDifferential, mvsim::DynamicsAckermannDrivetrain, and mvsim::DynamicsAckermann.
◆ getWheelsVelocityLocal()
| std::vector<mrpt::math::TVector2D> mvsim::VehicleBase::getWheelsVelocityLocal | ( | const mrpt::math::TTwist2D & | veh_vel_local | ) | const |
Current velocity of each wheel's center point (in local coords). Call with veh_vel_local=getRefVelocityLocal() for ground-truth.
◆ register_vehicle_class()
|
static |
Register a new class of vehicles from XML description of type "<vehicle:class name='name'>...</vehicle:class>".
◆ setVehicleIndex()
|
inline |
Set the vehicle index in the World
◆ simul_post_timestep()
|
overridevirtual |
Override to do any required process right after the integration of dynamic equations for each timestep. IMPORTANT: Reimplementations MUST also call this base method, since it is in charge of important tasks (e.g. update q_, dq_)
Reimplemented from mvsim::Simulable.
◆ simul_pre_timestep()
|
overridevirtual |
Process right before the integration of dynamic equations for each timestep: set action forces from motors, update friction models, etc.
Reimplemented from mvsim::Simulable.
Member Data Documentation
◆ angular_damping_
|
protected |
Damping ("c" viscous friction coefficient) for angular velocities of the chassis on world
◆ chassis_com_
|
protected |
center of mass. in local coordinates (this excludes the mass of wheels)
◆ fixture_wheels_
|
protected |
[0]:rear-left, etc. (depending on derived class). Size set at constructor.
◆ frictions_
|
protected |
Instances of friction model for the vehicle-to-ground interaction, for each wheel
◆ idealControllerActive_
|
protected |
When true, friction forces are computed (for wheel spin updates and logging) but NOT applied to the Box2D chassis body. This is set by ideal controllers that directly override the vehicle twist, so that friction reaction forces don't corrupt the kinematically-imposed trajectory.
◆ linear_damping_
|
protected |
Damping ("c" viscous friction coefficient) for linear velocities of the chassis on world
◆ maxRadius_
|
protected |
Automatically computed from chassis_poly_ upon each change via updateMaxRadiusFromPoly()
◆ slopeDir_
|
protected |
Gravity "down" direction in vehicle local frame. On flat ground = (0,0,-1). Updated by internal_simul_pre_step_terrain_elevation() each timestep.
◆ vehicle_index_
|
protected |
user-supplied index number: must be set/get'ed with setVehicleIndex() getVehicleIndex() (default=0)
◆ wheels_info_
|
protected |
Wheels info. The fixed size of this vector is set upon construction. Derived classes must define the order of the wheels, e.g. [0]=rear left, etc.
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/mvsimulator/checkouts/stable/modules/simulator/include/mvsim/VehicleBase.h