#include <VisualObject.h>
|
|
| VisualObject (World *parent, bool insertCustomVizIntoViz=true, bool insertCustomVizIntoPhysical=true) |
| |
|
| VisualObject (const VisualObject &)=delete |
| |
|
VisualObject & | operator= (const VisualObject &)=delete |
| |
|
| VisualObject (VisualObject &&)=delete |
| |
|
VisualObject & | operator= (VisualObject &&)=delete |
| |
| virtual void | guiUpdate (const mrpt::optional_ref< mrpt::opengl::COpenGLScene > &viz, const mrpt::optional_ref< mrpt::opengl::COpenGLScene > &physical) |
| |
|
World * | parent () |
| |
|
const World * | parent () const |
| |
|
void | customVisualVisible (const bool visible) |
| |
|
bool | customVisualVisible () const |
| |
| const std::optional< Shape2p5 > & | collisionShape () const |
| |
|
void | showCollisionShape (bool show) |
| |
|
|
static void | FreeOpenGLResources () |
| |
|
|
bool | parseVisual (const rapidxml::xml_node< char > &rootNode) |
| | Returns true if there is at least one <visual>...</visual> entry.
|
| |
|
bool | parseVisual (const JointXMLnode<> &rootNode) |
| |
|
virtual void | internalGuiUpdate (const mrpt::optional_ref< mrpt::opengl::COpenGLScene > &viz, const mrpt::optional_ref< mrpt::opengl::COpenGLScene > &physical, bool childrenOnly=false)=0 |
| |
|
void | addCustomVisualization (const mrpt::opengl::CRenderizable::Ptr &glModel, const mrpt::poses::CPose3D &modelPose={}, const float modelScale=1.0f, const std::string &modelName="group", const std::optional< std::string > &modelURI=std::nullopt, const bool initialShowBoundingBox=false, const std::optional< double > &scaleOverride=std::nullopt) |
| |
|
void | setCollisionShape (const Shape2p5 &cs) |
| |
|
|
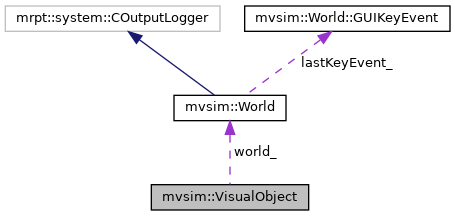
World * | world_ |
| |
| std::shared_ptr< mrpt::opengl::CSetOfObjects > | glCustomVisual_ |
| |
|
std::shared_ptr< mrpt::opengl::CSetOfObjects > | glCollision_ |
| |
|
int32_t | glCustomVisualId_ = -1 |
| |
|
const bool | insertCustomVizIntoViz_ = true |
| |
|
const bool | insertCustomVizIntoPhysical_ = true |
| |
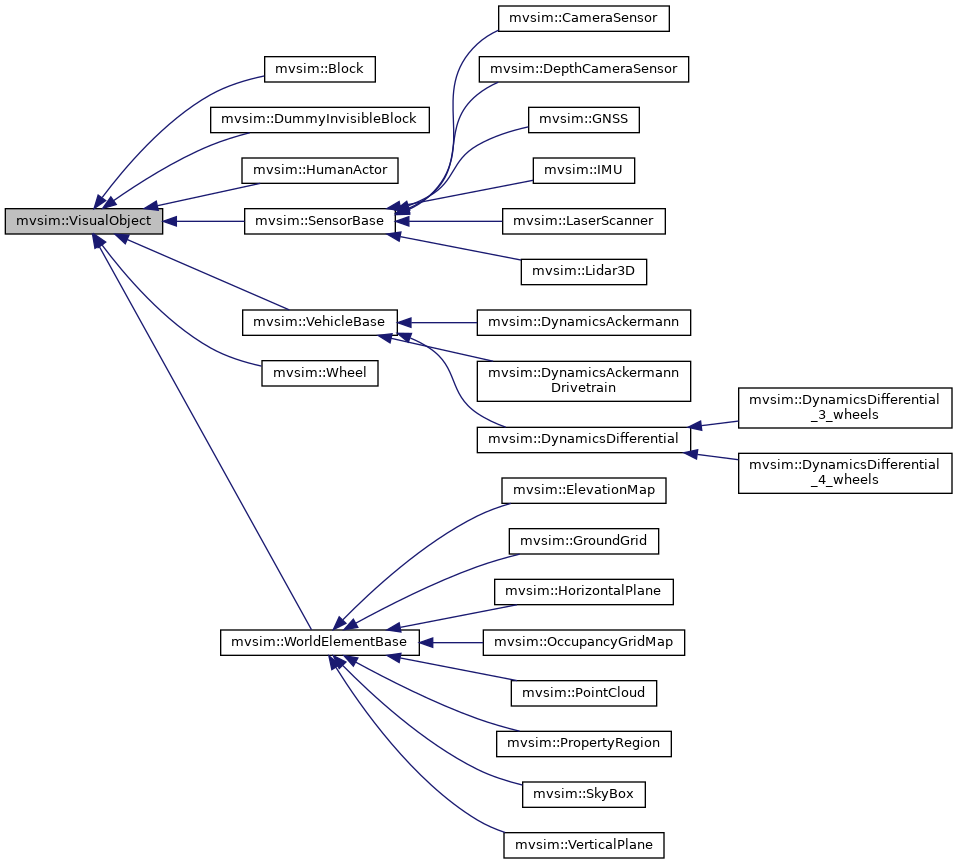
Virtual base class for any entity that can be shown in the 3D viewer (or sent out to RViz)
◆ collisionShape()
| const std::optional<Shape2p5>& mvsim::VisualObject::collisionShape |
( |
| ) |
const |
|
inline |
Returns the collision shape, if defined (should be for regular entities after correct initialization).
◆ guiUpdate()
| virtual void mvsim::VisualObject::guiUpdate |
( |
const mrpt::optional_ref< mrpt::opengl::COpenGLScene > & |
viz, |
|
|
const mrpt::optional_ref< mrpt::opengl::COpenGLScene > & |
physical |
|
) |
| |
|
virtual |
This creates a new object in the scene and/or update it according to the current state of the object. If none of the scenes are passed, the poses of existing visual objects are updated, but no new ones are created.
◆ GeometryEpsilon
| double mvsim::VisualObject::GeometryEpsilon |
|
static |
Epsilon for geometry checks related to bounding boxes (default:1e-3)
◆ glCustomVisual_
| std::shared_ptr<mrpt::opengl::CSetOfObjects> mvsim::VisualObject::glCustomVisual_ |
|
protected |
If not empty, will override the derived-class visualization for this object.
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/mvsimulator/checkouts/stable/modules/simulator/include/mvsim/VisualObject.h