#include <ControllerBase.h>
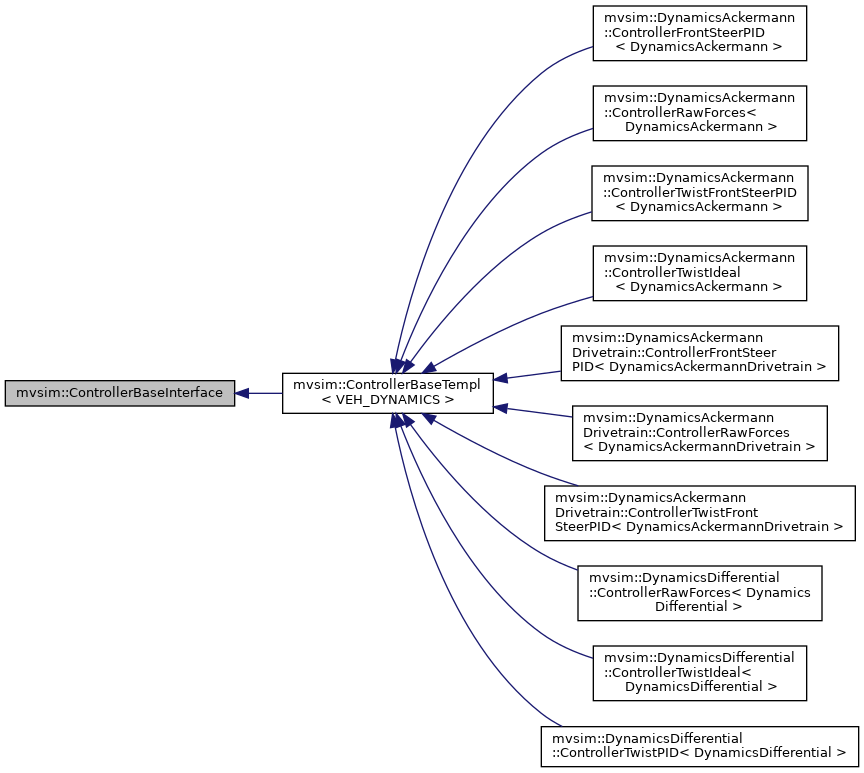
Inheritance diagram for mvsim::ControllerBaseInterface:
Classes | |
| struct | TeleopInput |
| struct | TeleopOutput |
Public Member Functions | |
| virtual void | teleop_interface ([[maybe_unused]] const TeleopInput &in, [[maybe_unused]] TeleopOutput &out) |
| virtual bool | setTwistCommand ([[maybe_unused]] const mrpt::math::TTwist2D &t) |
Detailed Description
Interface of ControllerBaseTempl<> for teleoperation, etc. Abstract interface common to any vehicle type & any controller.
Member Function Documentation
◆ setTwistCommand()
|
inlinevirtual |
Accept a Twist command.
- Returns
- true if the controller supports this kind of commands, false otherwise
Set these values to tell the controller the desired setpoints for linear (vx) (m/s) and angular (omega) (rad/s) velocities. Note that the "vy" component of the twist is ignored.
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/mvsimulator/checkouts/stable/modules/simulator/include/mvsim/ControllerBase.h