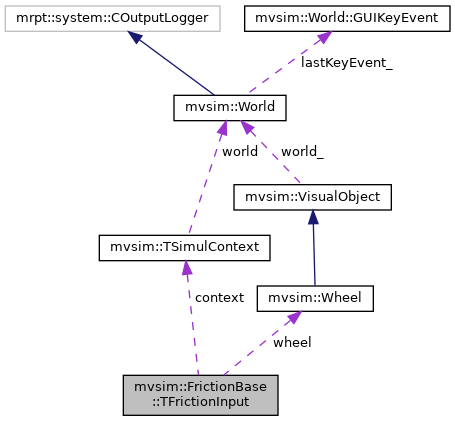
Collaboration diagram for mvsim::FrictionBase::TFrictionInput:
Public Member Functions | |
| TFrictionInput (const TSimulContext &_context, Wheel &_wheel) | |
Public Attributes | |
| const TSimulContext & | context |
| Wheel & | wheel |
| double | Fz = 0 |
| double | motorTorque = 0 |
| mrpt::math::TVector2D | wheelCogLocalVel {0, 0} |
| mrpt::math::TVector2D | gravSlopeForce {0, 0} |
| std::optional< double > | mu_override |
| std::optional< double > | C_rr_override |
Member Data Documentation
◆ C_rr_override
| std::optional<double> mvsim::FrictionBase::TFrictionInput::C_rr_override |
If set, overrides friction model's C_rr (from PropertyRegion)
◆ Fz
| double mvsim::FrictionBase::TFrictionInput::Fz = 0 |
Weight on this wheel from the car chassis (Newtons), excluding the weight of the wheel itself.
◆ gravSlopeForce
| mrpt::math::TVector2D mvsim::FrictionBase::TFrictionInput::gravSlopeForce {0, 0} |
Gravity slope force (Newtons) acting on this wheel's share of the vehicle mass, in vehicle local coordinates. This allows friction models to preemptively counteract gravity on slopes, preventing drift. On flat ground this is (0,0).
◆ motorTorque
| double mvsim::FrictionBase::TFrictionInput::motorTorque = 0 |
The force applied by the motor to the wheel (Nm). Negative means backwards, which makes the vehicle go forwards.
◆ mu_override
| std::optional<double> mvsim::FrictionBase::TFrictionInput::mu_override |
If set, overrides friction model's mu (from PropertyRegion)
◆ wheelCogLocalVel
| mrpt::math::TVector2D mvsim::FrictionBase::TFrictionInput::wheelCogLocalVel {0, 0} |
Instantaneous velocity vector (in vehicle local coordinates) of the wheel center of gravity (cog) point.
The documentation for this struct was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/mvsimulator/checkouts/stable/modules/simulator/include/mvsim/FrictionModels/FrictionBase.h